
�������: 1-15 ���鵽���Զ�������Ӧ�� ѧϰ����ؼ�¼20�� . ��ѯʱ��(0.318 ��)
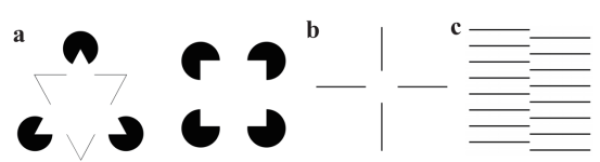
2023��3��30�գ��й���ѧԺ�Զ����о����о�Ա����������������������Ӿ�ϵͳ�й㷺���ڵĻþ��������������������һ�ֽ�����ѧϰ�Ӿ����ݼ�ת���ɻþ����������ķ��������������˵�ǰ�����ѧϰģ�ͶԻþ�����ʶ��������ʵ����֤���Ӿ���ĵ����Ƚ���������������������һ�����нϺõĻþ�����ʶ������������о��ɹ�������Patterns�ϡ�

2022��11��9�����磬�й���ѧԺ�Զ����о�����ί����ѧϰ�������ٿ����飬����ѧϰ���Ķ�ʮ����չѧϰ���������о�ѧϰ�᳹��ʵ��������ί���IJ�������ֻ��顣ȫ�嵳ίίԱ�λᡣ

�й���ѧԺ�Զ����о�����֯�����տ��й���ѧԺѧϰ�᳹���Ķ�ʮ���������ű���ᣨͼ��
�й���ѧԺ�Զ����о��� ���Ķ�ʮ���� �����ű����
2022/12/19
2022��11��7�����磬�й���ѧԺ��֯�ٿ�ѧϰ�᳹���Ķ�ʮ�����������׳�����ᡣ�������쵼���ӳ�Ա��ȫ���ص�ʵ���Ҹ����ˡ�����ίίԱ����ְ֧����ǵ�50�����������ܻ�����ѧ������������Ƶ�ֻ᳡�����տ���

�й���ѧԺ�Զ����о�����ί����������Ἧ��ѧϰ��ϰ��ƽ̸�ι����������ľ���Ժ�ļ�����������龫��ͼ��
�й���ѧԺ�Զ����о��� ��ί����������� ϰ��ƽ̸�ι�����
2022/12/19
2022��8��25�����磬�й���ѧԺ�Զ����о����ٿ���ί����������ѧϰ����ᣬ����ѧϰ��ϰ��ƽ̸�ι����������ľ���Ժ�ļ�����������龫������ݣ��������쵼���ӳ�Ա��ȫ���ص�ʵ�������εȲμӻ��飬��ί���IJ�������ֻ��顣

ѧ��ֹ�������ڵ��¡��Ķ���һ������Զ�������У��鼮�����ǵ���ʦ���ѡ�����ů���ģ��Ķ����¡�������Ϊ�᳹��ʵϰ��ƽ���������ȫ���Ķ����ĺ��ž����й��Զ���ѧ�����鴦��ϵ�ǰ������ع���ʵ�ʣ��������鴦ȫ���Ա�㲻�������滺����ѹ�����ḻլ�ҵ��Ļ������2022��5��17�����ԡ��ӼҾ���������ս���ߡ���Ϊ���⣬��չ��Ϊ��4��Ķ���ѧϰ������ÿ������Сʱ�������Ķ�ͬ��������ʽ����һ����...

½Ԫ�ţ�1920������ڰ���ʡ�����������أ��Զ����ơ����ݼ����Ե�������ר�ң��й�����Ƽ����ſƼ�ί���ʣ��ҹ��Զ�����ѧ����������֮һ��1941�꣬½Ԫ�Ŵӹ��������ѧ���չ���ϵ��ҵ����У�����̣�1945�꣬��������ʡ����ѧԺ���죻1949�꣬������ѧרҵ��ʿѧλ����ҵ���Ⱥ�Ƹ��Ϊ��ʡ����ѧԺ���о�Ա���о�����ʦ��1956�꣬�����й���ѧԺ�Զ����о�����������1965�꣬�����齨���й���ѧԺҺ��...

Ϊ�ӿ��ƽ������Ҽ����������ĺӱ����Ľ��蹤����2022��2��25�գ��ӱ�ʡ�Ƽ������ӱ�ʡ��ѧԺ�������Ҽ�����������ѧϰ�����������Ҽ�����������������Ɩ�顢����������毳�ϯ��̸������
���գ��������й���ѧԺ�����Զ����о���������ѧ�����ص�ʵ���������ѧϰ���������о���ȡ������Ҫ��չ���Ժ�־�о�ԱΪ��һ���ߡ���ʿ����˼ȪΪ�ڶ����ߵ������о��ɹ�Depth selection for deep ReLU nets in feature extraction and generalization���շ����ڹ����˹�������ģʽʶ��ģʽ�����ڿ�IEEE Trans. on Patter...

�й���ѧԺ�Զ����о������ǿ��ѧϰ�Ŷ�����������ǿ��ѧϰ��δ֪��������̽��������ͼ��
�й���ѧԺ�Զ����о��� ���ǿ��ѧϰ δ֪���� ����̽������
2020/8/24
�п�Ժ�Զ��������ǿ��ѧϰ�Ŷ������һ�ֻ������ǿ��ѧϰ��δ֪��������̽���㷨���ܹ�ʹ��������û������Ļ���������̽������ʵʱ����������ͼ�����ķ�����2020��IEEE TNNLS��[1]��δ֪����̽����ָ��������û���κ�����֪ʶ������£���һ���µĻ�����ͨ���ƶ�����������������ͼ�Ĺ��̣���ӳ�˻�����ϵͳ���������������ͶԻ�������Ӧ�ԣ��ǻ����������һ���ȵ����⡣����ʵ�������Ź㷺��Ӧ�ó��������...

�п�Ժ�Կ�ѧ�����ܼ���Խ�������������о������п�Ժ�Զ�������Ȼ����������������鳤�ද��ģ�ͺ��ٴ��������ߵĹ��ܴŹ���Ӱ�����ݣ��ڹ������״���ƺ�-�˿����ֵĻ���ѧϰ�������̣����о����ô�ת����⨺�ģ����ѧϰ�����������ٴ��������ߵķ�����ģ�ͣ�����������������Ա�֢��ǿ��֢����·���ƣ�Ϊ������Ӱ��ѧ������ṩ����֤�ݣ����������÷����鳤��ģ�ͷ������ٴ�Ӧ���������;������...
�й���ѧԺ�����Զ����о���������ӽ�����ġ�������ѧϰ�о�ȡ�ý�չ��ͼ��
�й���ѧԺ�����Զ����о��� ���ӽ����� ����ѧϰ ���ӽ�����ѧϰģ�� ����ѧϰ
2020/4/15
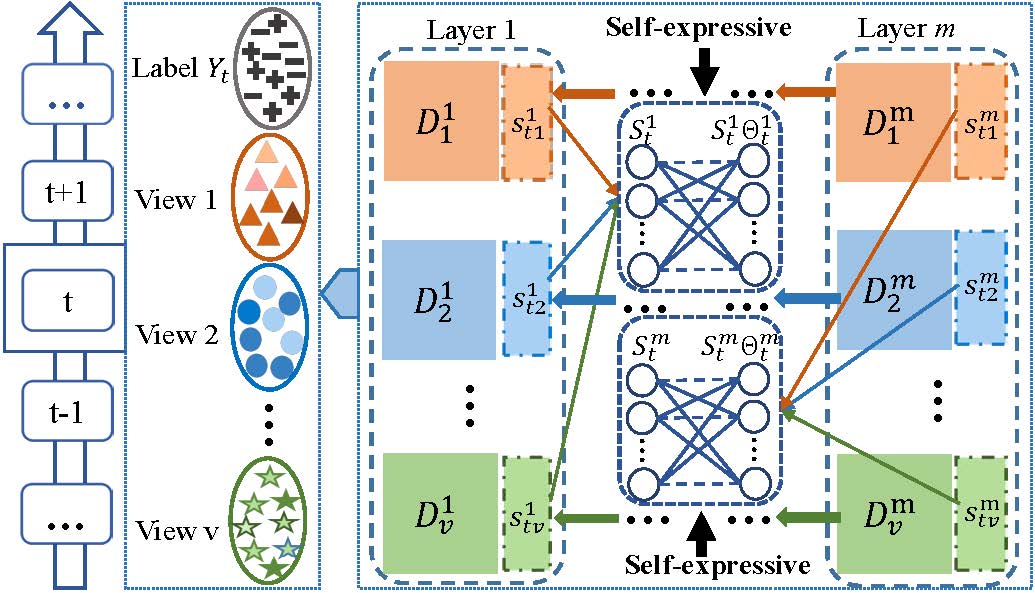
Ϊ����ִ�ֵĶ��ӽ�����ѧϰģ�Ͳ��ܿ���ѧϰ����������⣬�й���ѧԺ�����Զ����о���������ѧ�о��ҿ����Ŷ������һ���������ӽ�����ѧϰ�㷨������ѧϰ������ӽ�������سɹ���Continual Multiview Task Learning via Deep Matrix FactorizationΪ�ⷢ�����п�Ժһ���ڿ�IEEE TRANSACTIONS ON NEURAL NETWORKS...

�й���ѧԺ�����Զ����о����������ѧϰ�ĺ���ͼ��Ŀ�����о�ȡ�ý�չ��ͼ��
�й���ѧԺ�����Զ����о��� ���ѧϰ ����ͼ�� Ŀ����
2019/12/18
���գ��й���ѧԺ�����Զ����о��������Ե������ȥ������ͼ�����������Ŀ��ķ���������Ժ���ͼ�������������Ӧ�ļ�����硣��سɹ�������Sensors�ϡ�����ͼ���Ŀ������ũҵ����Դ��̽���������Ź㷺��Ӧ�����������������ϸ�ļ��Ҫ��Ҳ�ƶ��˼���㷨�ĸĽ����¡��ڻ������ѧϰ��Ŀ���ⷽ������Ҫ���������͵��Ż��ֶΣ���Դ����Ŀ�������Ż���������ܣ��Ż����������������
Qѧϰ�㷨�ڿ������е�Ӧ��
Qѧϰ �����ɷ���߹��� ������
2008/12/31
Qѧϰ�㷨��Watkins����������Ϣ����ȫ�����ɷ���������һ��ǿ��ѧϰ
����.���������һ���µ�̽������,�����ò��Ժ�Qѧϰ�㷨��Ч��������һ����͵�
������״̬�;��߿ռ�Ŀ���������.�������,�÷��������Ŀ��Ʋ��Ժ���ֵ������
��ģ����֪�����������õ����Ų��Էdz��ƽ�,�Ӷ�֤ʵ��Qѧϰ�㷨��һЩϵͳģ��
δ֪�Ĺ��̿��������е�Ӧ��DZ��.
�������Զ���켣����ģ��ѧϰ����
�������Զ�� �켣���� ģ������
2008/12/30
�������Զ���켣����ģ��ѧϰ����.
���һ��δ֪����ѧ���̵ĵ�����ϵͳ,���ò�ֵ�Ĵ�����Box Model����ѧϰ����.
�봫ͳ��Box Model���������Ԫ���Զ����Ŀ���ģʽ�Ƚ�,��ģ�����˼����Ȼ,�㷨
��.������С(����С����������),ѵ��ʱ���,���������д����Ե�ʵ���ķ�����
Ҳ�����������.
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...