
搜索结果: 1-15 共查到“控制科学与技术 学习”相关记录168条 . 查询时间(0.271 秒)
基于滚动时域强化学习的智能车辆侧向控制算法
滚动时域 强化学习 智能汽车 侧向控制
2024/1/16
针对智能车辆的高精度侧向控制问题,提出一种基于滚动时域强化学习(Receding horizon reinforcement learning,RHRL)的侧向控制方法.车辆的侧向控制量由前馈和反馈两部分构成,前馈控制量由参考路径的曲率以及动力学模型直接计算得出;而反馈控制量通过采用滚动时域强化学习算法求解最优跟踪控制问题得到。
机械臂变长度误差跟踪迭代学习控制
迭代学习控制 误差跟踪 变迭代长度 机械臂
2024/1/16
针对任意初始状态下机械臂轨迹跟踪问题,提出一种变长度误差跟踪迭代学习控制(Iterative learning control,ILC)方法.首先,构造不依赖于期望轨迹的双曲余弦型期望误差轨迹,放宽经典迭代学习控制初始状态要求严格一致的条件.由于该误差轨迹只需设置一个常数项,因而能够有效减少计算量,使得期望误差轨迹的设计更为简单.其次,考虑机械臂运行区间随迭代次数变化的问题,构建虚拟误差变量补偿机...
针对机器人摄影测量中离线规划受初始位姿标定影响的问题,提出融合初始位姿估计的机器人摄影测量系统视点规划方法.首先构建基于YOLO(You only look once)的深度学习网络估计被测对象3D包围盒,利用PNP(Perspective-N-point)算法快速求解对象姿态;然后随机生成机器人无奇异无碰撞的视点,基于相机成像的2D-3D正逆性映射,根据深度原则计算每个视角下目标可见性矩阵;最后...
基于外环速度补偿的封闭机器人确定学习控制
确定学习 速度补偿控制 神经网络 封闭机器人
2024/1/16
针对未开放力矩控制接口的一类封闭机器人系统,提出一种基于外环速度补偿的确定学习控制方案.该控制方案考虑机器人受到未知动力学影响,且具有未知内环比例积分(Proportional-integral,PI)速度控制器.首先,利用宽度径向基函数(Radial basis function,RBF)神经网络对封闭机器人的内部未知动态进行逼近,设计外环自适应神经网络速度控制指令.在实现封闭机器人稳定控制的基...
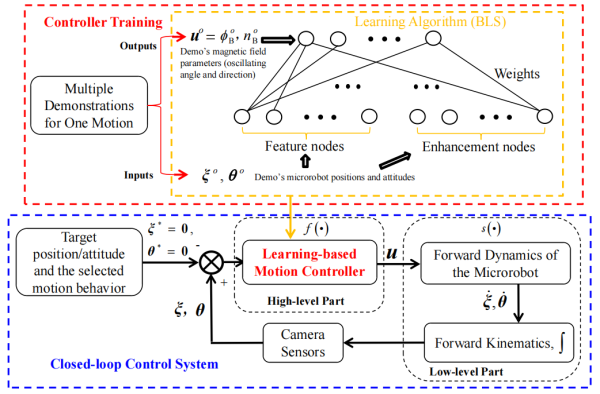
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/31
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...

中国科学院自动化研究所主题教育读书班赴怀柔开展调研学习活动(图)
主题教育 调研学习 北京怀柔
2023/5/22
为进一步深化学习贯彻习近平新时代中国特色社会主义思想主题教育效果,2023年5月15日,中国科学院自动化研究所党政领导班子成员、纪委委员、支部书记、机关中层干部44人赴中科院与“两弹一星”纪念馆和怀柔“脑认知功能图谱与类脑智能交叉研究平台”开展调研学习活动,不断推动理论学习往深里走、往实里走、往心里走。

2023年5月8日下午,中国科学院自动化研究所召开学习贯彻习近平新时代中国特色社会主义思想主题教育动员部署会。党委书记牟克雄作动员讲话并就落实好主题教育各项任务作部署要求。所领导班子成员、党委委员、纪委委员、机关中层干部和支部书记参加会议,会议由纪委书记许冬主持。

2023年4月21日下午,自动化所召开党委理论中心组学习会,传达学习贯彻习近平新时代中国特色社会主义思想主题教育工作会议精神和院党组关于主题教育工作的部署要求,对自动化所主题教育工作进行专题研究和部署。党委书记牟克雄主持会议。
中国科学院自动化所揭示深度学习模型对幻觉轮廓“视而不见”(图)
自动化所 学习模型 幻觉轮廓 视而不见
2023/5/7
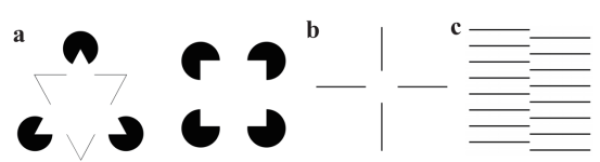
2023年3月30日,中国科学院自动化研究所研究员曾毅课题组基于人类和生物视觉系统中广泛存在的幻觉轮廓现象启发,提出了一种将机器学习视觉数据集转换成幻觉轮廓样本的方法,量化测量了当前的深度学习模型对幻觉轮廓识别能力。实验结果证明从经典的到最先进的深度神经网络均难以像人一样具有较好的幻觉轮廓识别能力。相关研究成果发表在Patterns上。

第七届深度强化学习理论与应用研讨会顺利召开(图)
算法应用 交通信号控制 无人系统
2023/5/22
2023年1月5-6日,第七届深度强化学习理论与应用研讨会顺利举行。活动聚焦深度强化学习(DRL)与博弈、自动驾驶和机器人等方向的前沿进展与最新成果开展研讨交流,并邀请4位领域专家分别从“小样本强化学习算法及应用的研究进展”,“基于深度强化学习的交通信号控制进展”,“无人系统分布式协同控制”,“基于深度强化学习的智能电网新能源高效利用”等不同主题进行了精彩分享。报告环节在线上平台进行同步直播,吸引...

2023年1月4日上午,中国科学院自动化研究所召开2023年党委中心组首次学习扩大会,传达学习中央经济工作会议和中央农村工作会议精神。所领导班子成员,党委委员和全国重点实验室主任参加会议,党委书记牟克雄主持会议。
基于深度学习的二维人体姿态估计
深度学习 二维人体 姿态估计
2022/12/30
人体姿态估计是计算机视觉领域的一个基础且具有挑战的任务,人体姿态估计对于描述人体姿态、人体行为等至关重要.有许多计算机视觉任务都是以人体姿态估计任务作为基础的,包括行为识别、行为检测等等.近些年,随着深度学习技术的发展,尤其是随着卷积神经网络算法的提出,我们可以通过神经网络强大的拟合能力和特征提取能力建立一种隐式的人体姿态估计模型,大大降低了人体姿态估计的门槛,同时也提高了人体姿态估计的准确率,这...
东北大学信息科学与工程学院开展“青年说”系列学习宣讲活动
宣讲活动 “青年说” 东北大学
2023/4/10
近日,东北大学信息科学与工程学院启动“学习党的二十大精神砥砺奋进新征程”――“青年说”系列学习宣讲活动,内容包括“学原文・强信念”“学思想・说使命”“学精神・同奋斗”三个子项目。

2022年11月9日上午,中国科学院自动化研究所党委理论学习中心组召开会议,传达学习党的二十大精神,开展学习交流,并研究学习贯彻落实方案。党委书记牟克雄主持会议。全体党委委员参会。